

Interested in joining our team?
Recruitment for Monash Nova Rover’s 2026-27 design cycle is now open!
Check out our subteams below to find out more about what they do, and who they are looking for. For more information on each subteam and what we do at Nova, keep an eye on our social media platforms.
To apply, find the application form on our linktree.
We cannot wait to read your applications!
Have any questions? We’d love to hear from you at novaroverteam@monash.edu
Applications are now open!

Read more about the subteams below, and find out more about what skills will make you an ideal candidate. We strive to build a supportive learning environment, so don’t be worried if you don’t have all of the listed skills. Our team is more than happy to help you upskill during your time here!
Find out more about each subteam!
-

Adaptive Payload
-

Arm
-

Chassis
-

Electrical
-

Science
-
Software
-

Autonomous
-

Business & Media
-

Outreach
Adaptive Payload
The Adaptive Payload (AP) subteam is responsible for designing versatile and robust payloads for the Excavation and Construction task at ARCh, and the Exploration and Delivery tasks at URC.
With new competition rules and a new rover, our payloads are being redesigned around new criteria — optimised for strength and weight. These include:
The Scraper — excavates regolith and rocks, and constructs a berm
The Tile Placer — deploys sand-mitigating tiles for lunar transport
The Forklift — transports the Tile Placer and removes tiles
Rosella — our drone payload, performing reconnaissance support for the rover
Alongside our core payloads, AP also leads the team's carbon fibre research — including a carbon fibre drone body and our work with Forge Carbon — helping us push lighter, stronger designs across the rover.
AP is focused on upskilling members of all levels — whether you want to learn CAD and manufacturing from scratch, or dive into research and testing in areas like carbon fibre to help us optimise and refine our payloads. Along the way, you'll gain hands-on experience with validation and manufacturing processes such as finite element analysis (FEA) and carbon fibre layups. There's also nothing quite like manual machining a part yourself and watching your design come to life on the rover.
If this sounds like you, apply to join us!
-
Any CAD experience (OnShape preferred)
Personal Engineering Projects (Dynamic or Static)
Hand/Power tool experience
Manual Machining
Arm
The Arm subteam designs, manufactures, and integrates the robotic arm which is used for dexterous manipulation tasks on the rover. This year we will be improving our brand new robotic arm Taipan, focusing on design optimisations and reliability.
New recruits will develop CAD and 3D printing skills, with opportunities to get hands-on experience with machining and fabrication. You’ll also collaborate with the electrical and software subteams to help integrate and test the systems you’ve designed.
If you are eager to grow your engineering skills and help us improve Taipan we strongly encourage you to apply and follow our progress!
-
CAD experience (Eg. Onshape, Solidworks, Fusion 360)
3D printing
Personal engineering projects
Design experience
Additional Skills and Knowledge
Basic electronics knowledge (Eg. ENG1013)
Interest in software and programming
Basic robotics knowledge
Chassis
The Chassis subteam is the mechanical backbone of the rover, responsible for the design, fabrication and maintenance of our core mechanical systems. This cycle, the Chassis team will design and build a new rover from the ground up, including the development of custom systems such as our drivetrain and suspension, manufacturing using 3D printing, machining and composites as well as maintaining of our current rover, Banksia.
Members will have the opportunity to gain hands-on experience with our manual and CNC machines, a wide variety of light fabrication tools and extensive CAD and system validation experience. They will also have the chance to work interdisciplinarily with the wider team and see their projects come to life at competition.
We welcome all engineering backgrounds and experience levels, if you are interested in anything we have mentioned and much more, we encourage you to apply!
-
CAD experience
3D printing, handtools or any other fabrication techniques
Personal projects
Foundational mechanics and materials knowledge
Electrical
The Electrical subteam is responsible for the design, assembly and maintenance of the rover’s electrical systems. We are a core subteam and play a major in every part of the rover's development. The subteam facilitates communication between the rover and the base station enabling reliable system integration. In addition, we design and assemble circuit boards, develop firmware, troubleshoot our systems, and manage the batteries used to power the rover. We produce a robust system that is capable of running our computers, motor drivers, robotic arm, scientific payload, and many other elements across the rover.
If you're interested in one or many of these areas, have a good work ethic and time to dedicate to the team, we'd love to hear from you!
-
Circuit analysis
Microcontroller experience (e.g. dsPIC, STM32, Arduino)
Embedded systems firmware development
PCB design experience (e.g. KiCad, Altium)
Soldering and crimping experience
Radios and networks
Science
The Science Subteam is composed of both payload scientists and payload engineers working in tandem on our payloads. Our payloads involve resource extraction, life detection and data collection instruments, focused on Lunar and Martian environments. We research how chemical tests can be used to detect life, test and prototype in-house systems, and are resposible for writing the scientific reports required for the competitions.
We research and design our own custom instruments including:
UV-Vis Spectrometer — analyses our custom chemical suite for signs of life
Potentiostat — analyses soil samples for their redox activity
NIR Probe — analyses the water concentration of icy regolith samples in infrared
Ilmenite ML Model — uses machine learning to detect mineral concentrations
Kiln and Condenser — extracts water from icy regolith, melting out the water and condensing it into liquid water
As well as our two extraction payloads:
Narwhal — extracts icy regolith and transports it to our kiln and condenser
Sabretooth — extracts and caches sub-soil samples and transports it to our life detection instruments.
-
Any CAD software
3D printing experience
Basic electrical prototyping skills (e.g., soldering, using motors/sensors, Arduino, STM 32)
Understanding of basic mechanical principles (e.g., loads, moments)
-
Interest in space
Interest in or experience with chemistry
Some background in biochemistry (e.g., proteins, enzymes) — or willingness to build this
Experience planning scientific experiments
Interest in astrobiology
Interest in learning about lunar and martian geology
Interest in engineering
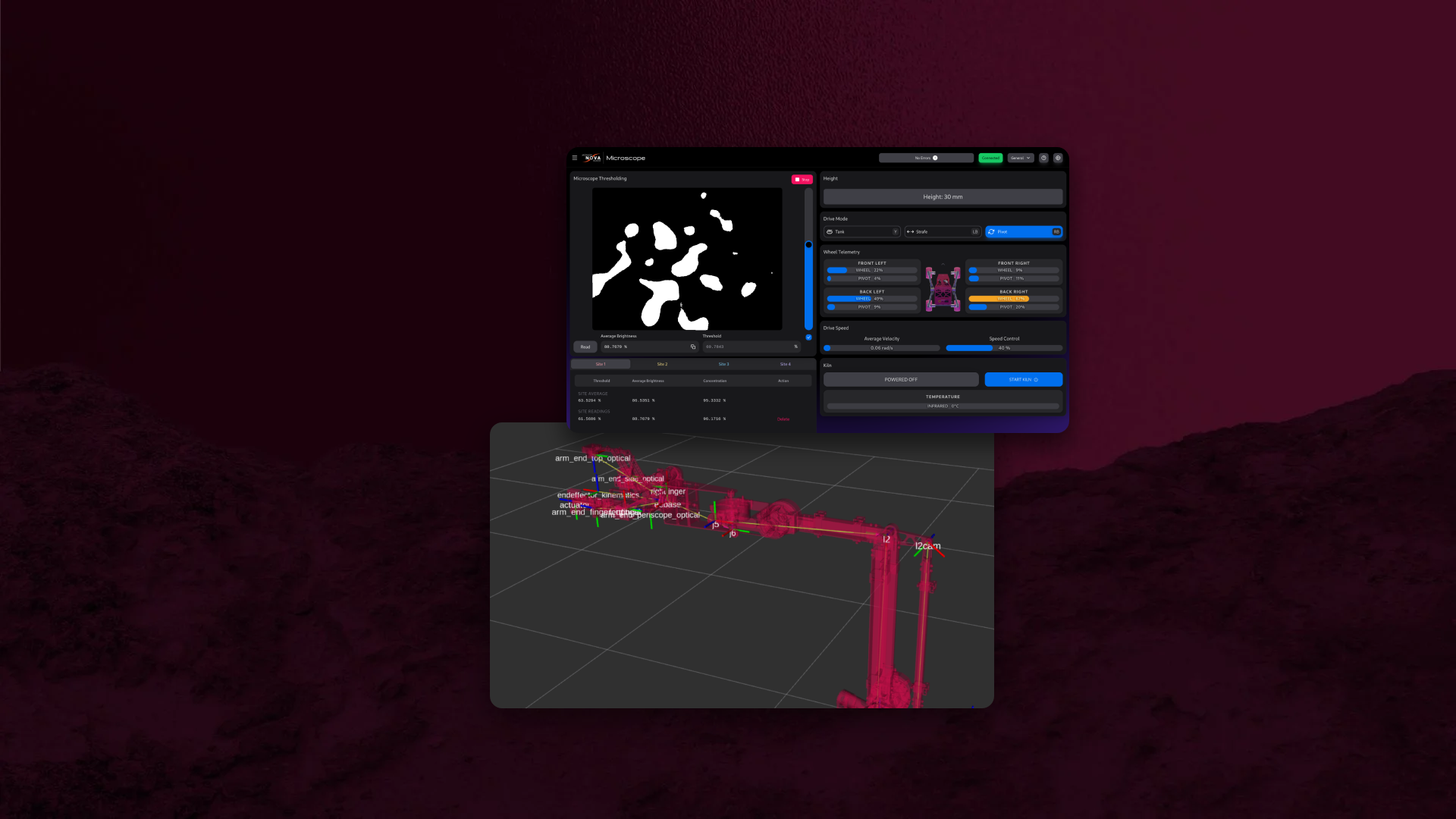
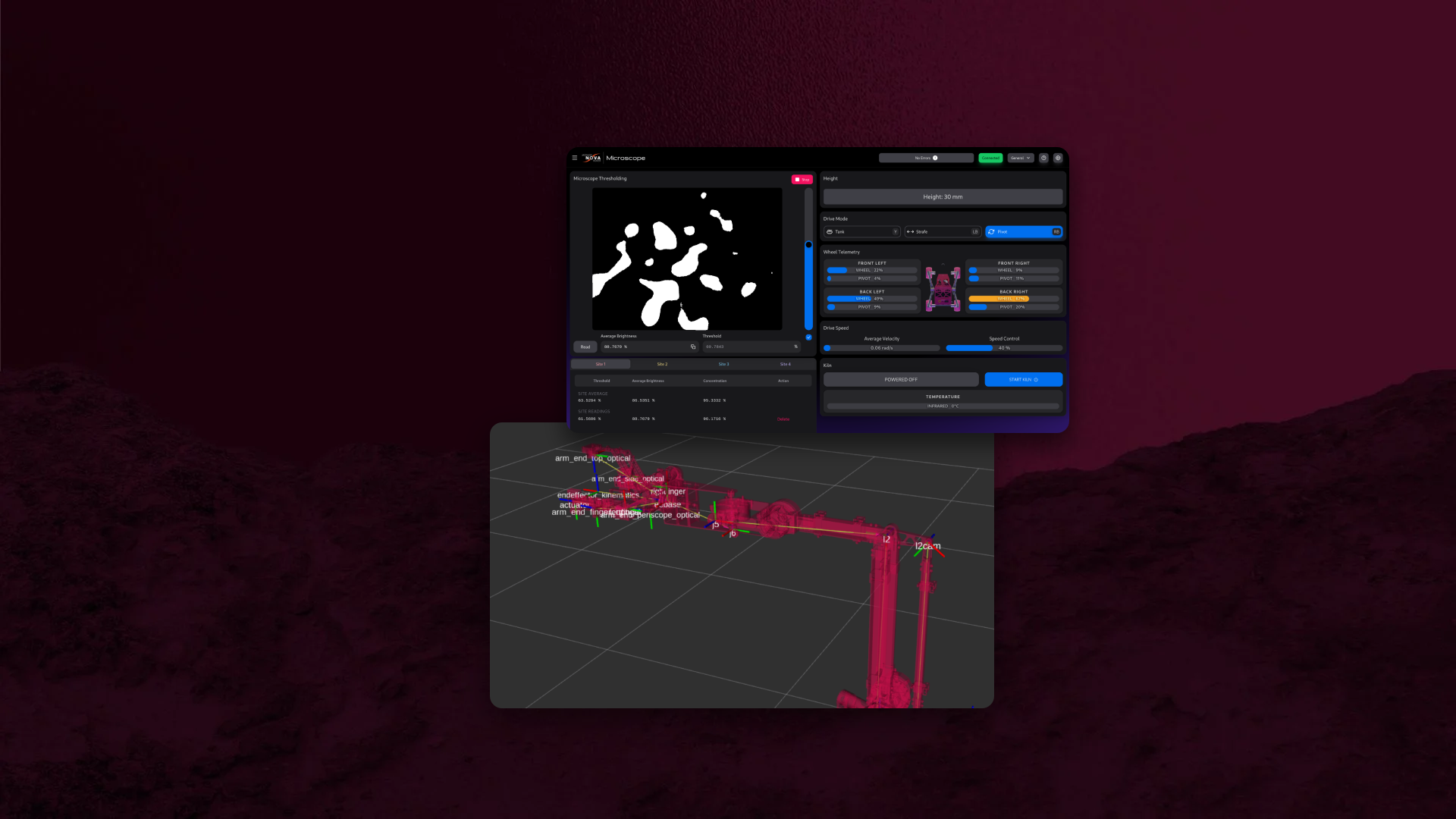
Software
The Software subteam is responsible for developing and maintaining all the software systems used to run and operate the rover. This includes both on-rover systems that move various types of motors, take readings, and operate custom-designed electronic components and off-rover systems that input control, receive camera and sensor data, and display rover state. This also includes maintaining the rover's Linux operating system, package architecture, compatibility for miscellaneous hardware, radio communications, base station computers and much more. Our team's projects primarily focus on the following areas:
- Adding features to the Graphical User Interface using React and TypeScript.
- Creating or editing ROS2 nodes used to communicate between control interfaces (GUI, Gamepad, etc.) and the rover's microcontrollers. This includes arm, drive, sensors, actuators, pumps, light controls and so much more. These are written in either Python or C++.
- Maintaining software packages and compatibility with new and existing rover hardware. This utilises Nix, Linux and hardware skills to create a reliable software environment.
Overarching projects work on improving our software architecture, code maintainability and migrating to utilise industry-accepted frameworks.
-
Some programming experience (Python, C++ preferred)
Git (software development version control), ideally with experience in a team setting
-
These are good to have, but aren’t required.
Linux - Any level of experience is useful.
ROS2 - This is the main framework we use to communicate and control the rover, and is available for Python and C++. No prior experience is required.
Nix / NixOS - This is our package management system and OS. No prior experience is required.
React / JavaScript / TypeScript - Used to develop our Graphical User Interface (GUI) that controls the rover. No prior experience is required.
Unity - Our new rover simulator is being developed in this framework. No prior experience is required.
To learn any of the skills mentioned, here are some resources to get you started:
-
Easy way to learn basic Linux commands: https://overthewire.org/wargames/bandit/bandit0.html
-
Get started with NixOS: https://nixos.org/
Great resources to learn Nix: https://nixos.org/guides/nix-pills/, https://zero-to-nix.com/, https://ianthehenry.com/posts/how-to-learn-nix/introduction/
-
See here to get started with ROS2: https://docs.ros.org/en/jazzy/index.html
This website has some more practical ROS2 tutorials: https://articulatedrobotics.xyz/
Docs with tutorials for ROS2 Control: https://control.ros.org/master/index.html
Getting started docs for Nav2: https://docs.nav2.org/
Autonomous
The autonomous subteam is responsible for designing and developing an intelligent navigation system to compete at the autonomous challenges at ARCh and URC. Members work on a wide range of problems, including but not limited to:
- Integrating sensors to map and navigate the environment.
- Designing and implementing custom rover behaviour.
- Developing the team’s simulation capabilities.
As a recruit, you will gain hands-on experience developing autonomous systems and integrating them into a real rover. In the process, you will learn how to use the ROS2 framework and accompanying packages through a mix of C++ and Python. You will also learn how to integrate and debug sensors and systems such as LiDARs and GPS modules.
Additionally, members will have the opportunity to work closely with other subteams such as Software and Electrical on the infrastructure supporting the autonomous stack, for example networks, firmware and simulations.
If any of this sounds interesting, we encourage you to apply!
-
Experience in at least 1 programming language (Python, C++ preferred)
Git / GitHub - ideally with experience in a team setting.
-
Linux - Any level of experience is useful.
Familiarity around CLIs
ROS2 and Nav2 - This is the main library we use to communicate and control the rover, it is available for Python and C++. No prior experience is required.
Nix / NixOS - This is our package management system and OS. No prior experience is required.
Unity - Simulation development.
Robot Autonomy Knowledge (e.g. SLAM, path-planning).
To learn any of the skills mentioned, here are some resources to get you started:
-
Easy way to learn basic Linux commands: https://overthewire.org/wargames/bandit/bandit0.html
-
Get started with NixOS: https://nixos.org/
Great resources to learn Nix: https://nixos.org/guides/nix-pills/, https://zero-to-nix.com/, https://ianthehenry.com/posts/how-to-learn-nix/introduction/
-
See here to get started with ROS2: https://docs.ros.org/en/jazzy/index.html
This website has some more practical ROS2 tutorials: https://articulatedrobotics.xyz/
Docs with tutorials for ROS2 Control: https://control.ros.org/master/index.html
Getting started docs for Nav2: https://docs.nav2.org/

Business & Media
The Business and Media subteam is responsible for sharing the teams’ journey and achievements with the wider community, acting as the link between Nova and the world. We support the team from all non-technical aspects including media, marketing, design and sponsorship.
Business and Media is in charge of the creation of our Distributed Field Test (DFT) and Systems Acceptance Review (SAR) videos which are critical components of our competition deliverables. Alongside this, our work spans across content creation, photography, graphic designing, videography, merchandise and editing.
Members of Business and Media can expect to learn design philosophies through the creation of merchandise and visual assets, and work on large scale video projects which involve team collaboration, storyboarding, filming and editing whilst developing critical soft skills.
If you’re passionate about design and visual storytelling, or eager for a creative outlet - Business and Media is for you!
-
Video production experience (Adobe Premiere Pro, DaVinci Resolve, Capcut, Blender, etc.)
Graphic design experience (Canva, Photoshop, etc.)
Camera experience (DSLR, mirrorless, or phone photography/videography)
Outreach
The Outreach Subteam is responsible for organising, developing and running community events, school visits and technical STEM workshops for high school students of all backgrounds. These events showcase what engineering and robotics are really like in practice, providing a pathway for students to explore STEM.
In addition to running events, the subteam works behind the scenes to develop these experiences. Currently, this involves a miniature robotic arm with four degrees of freedom, combining mechanical and electrical knowledge to bring the project to life.
A core focus of the Outreach Subteam is promoting diversity in STEM, in line with Nova’s Pink Rover Initiative. Our team works to actively challenge stereotypes and foster inclusive conversations within the broader community.
Outreach is a multidisciplinary subteam, and we welcome students from a wide range of degrees. While engineering students contribute technical expertise, students from fields such as education, design, media, business and communications bring valuable skills that help make our workshops more engaging, accessible and impactful. For example, education students play an important role in improving how we interact with students and design meaningful learning experiences.
If you feel passionate about sharing a love for STEM and robotics, inspiring the next generation and developing your own technical and professional skills, then Outreach may be for you! Even if you are enthusiastic about joining the team but don’t feel technically ready or confident yet, this subteam is a great pathway into Nova that will help you grow while making a real impact in the community.
-
Help plan and coordinate school visits, public events, and STEM workshops
Run hands-on outreach sessions, guiding students through mini-rover builds and activities
Contribute to the design and development of workshop content and rover kits
Communicate the outreach vision and values across the broader Nova team
Engage with schools, universities, and the public to represent Nova Rover’s mission
-
- A passion for education, mentoring, or working with school students
A desire to promote diversity and inclusion in STEM fields
Excitement about robotics, space, and engineering, even without technical experience
Enjoyment of public speaking, presenting, and engaging with groups