Our Rovers
Explore all of our different rovers over the years.
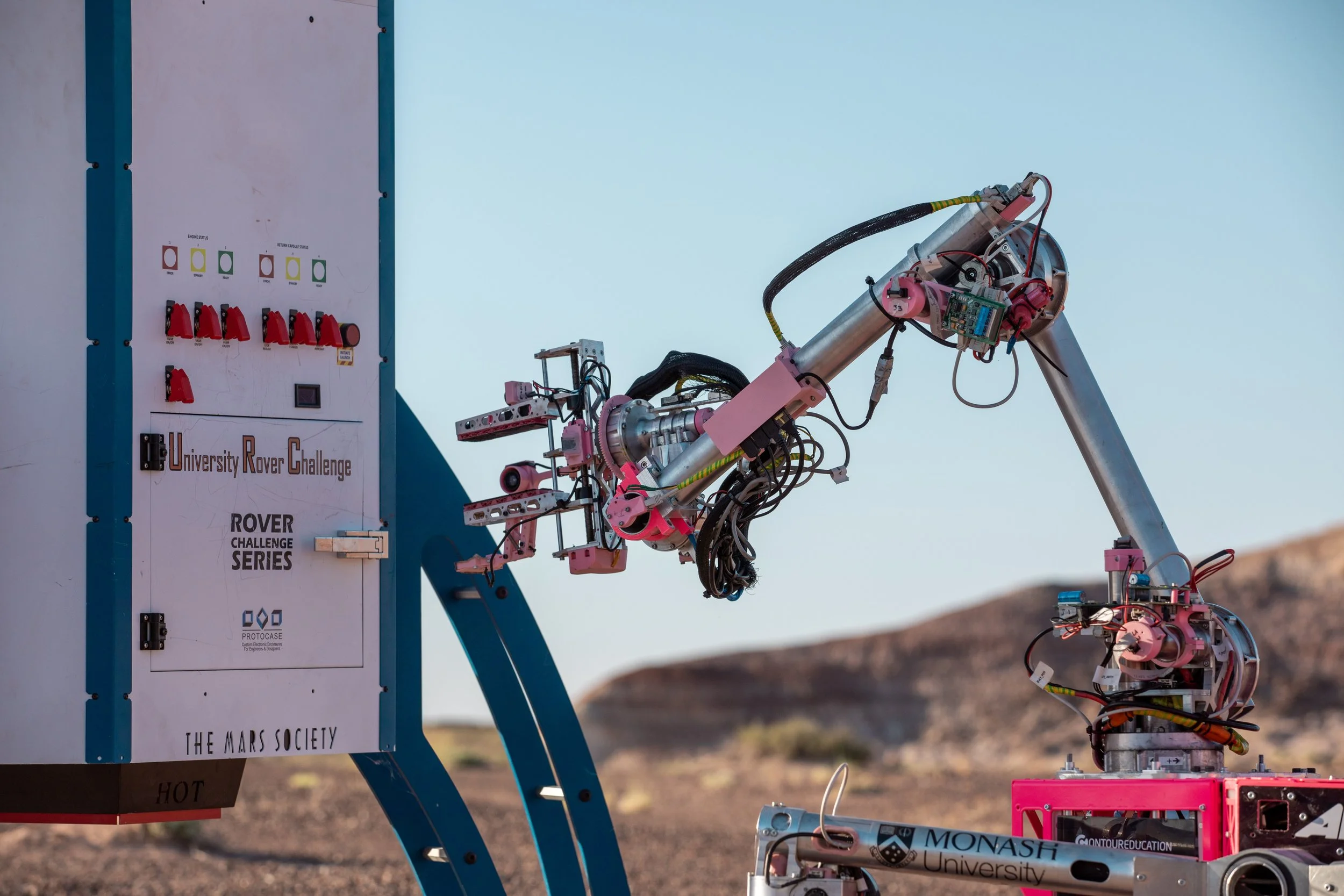
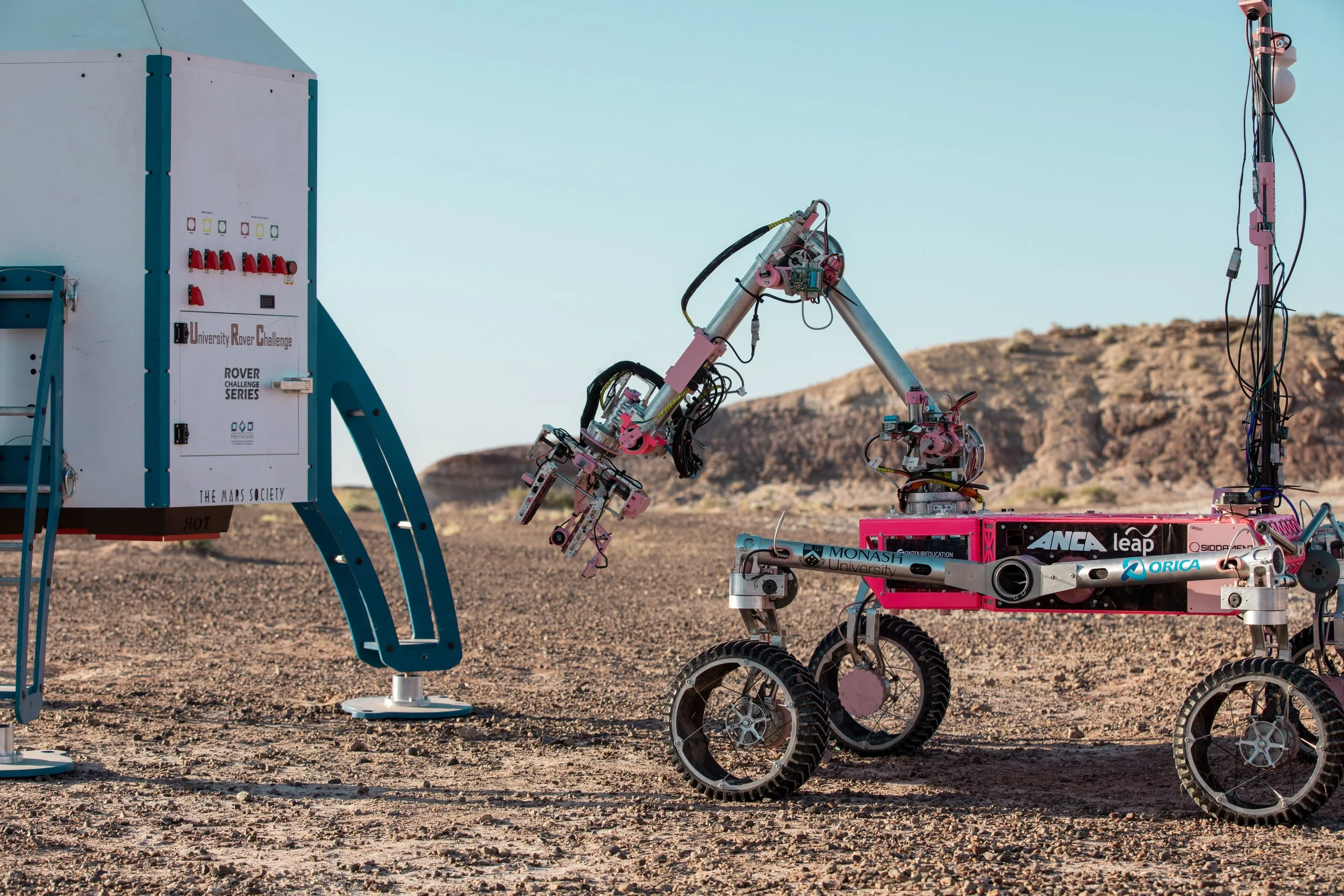
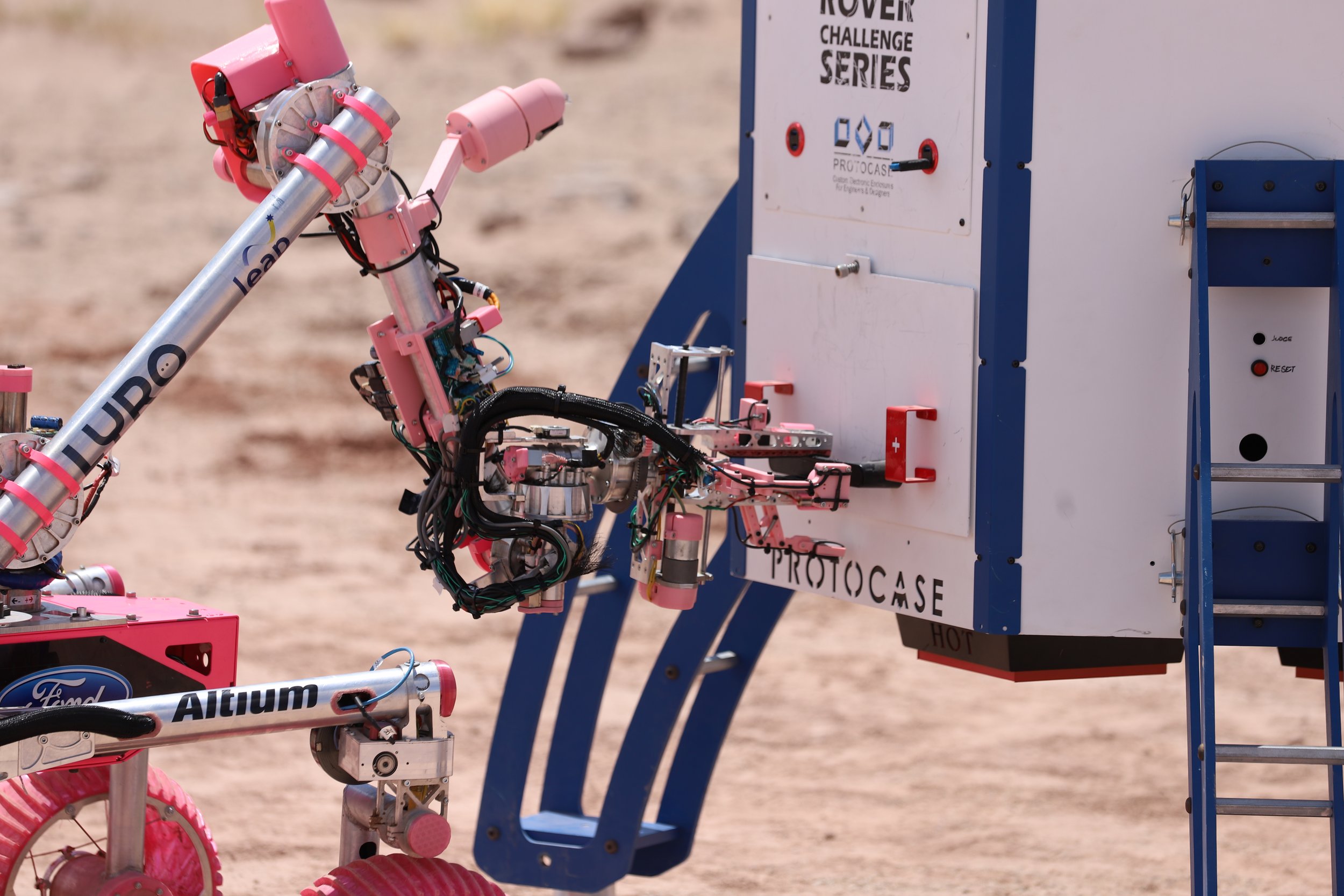
Like its predecessor, Banksia is named after a native flower that symbolises Australia's natural diversity and resilience. We continue to incorporate the bright, signature pink hue into our rover design this year, which aim to further promote and sparks conversations through the Pink Rover Initiative. This year, we have redesigned the core processing system and in the process of developing a new robotic arm.
BANKSIA
2025
-
Weight: 28-60kg
Dimensions: 1.2m x 1.1m x 0.8m (excluding mast height)
Wheels: 3D printed polyurethane (TPU) with bike spoke internal geometry
Chassis Build: Laser cut aluminium frame with polycarbonate side panels
Suspension: Rocker suspension with pivot steering
Power: 2 x 4S2P LiPO batteries (28.8V)
Motors and gearboxes: 8 brushless (BLDC) motors with a 15:1 reduction on drive and 70:1 reduction on pivots
Chassis and Arm Motor Controllers: Custom Brushless CAN-Bus Motor Drivers (BLCMDs) with Field Oriented Control
Computing: Nvidia Jetson Orin Nano, dsPIC32, STM32 and Arduino Nano Microcontrollers
Communications: 5GHz and 2.4GHz AirMAX and 900MHz HaLow
Control: Xbox One Controller and Thrustmaster Joysticks
Vision: 8 static Microsoft LifeCam, 4K Reolink PTZ,
Sensors: Livox Mid-360 LiDAR, Luxonis OAK-D LR Depth Cameras, differential GNSS, IMU, encoders, air pressure, temperature, humidity
Life detection: Rapid amino acid and protein assays, UV-VIS spectrometer, NIR probe and microscope
Resource collection: Water detection and extraction devices and regolith extraction devices
Software Stack: ROS2, ROS2_Control, Teleop_Modular, React, GStreamer, Nix
Autonomous: Waypoint Navigation/Path Planning (Nav2), Obstacle Detection and Avoidance (RTAB-Map/STVL), Robot Localisation (Nav2), Mapping (RTAB-Map), Object Detection and Localisation, Decision Making (Nav2 Behaviour Trees), Computer Vision (YOLOv11)




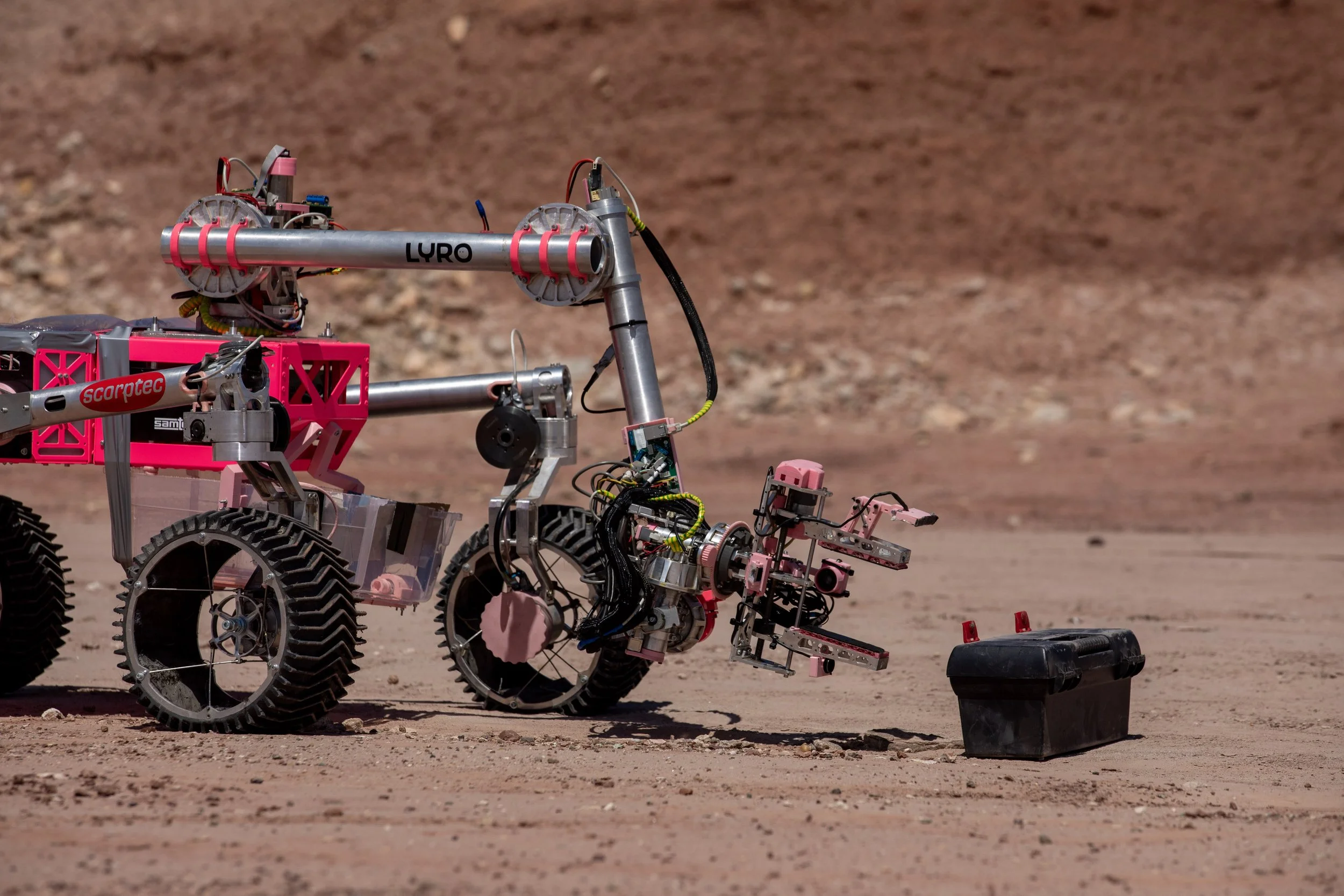
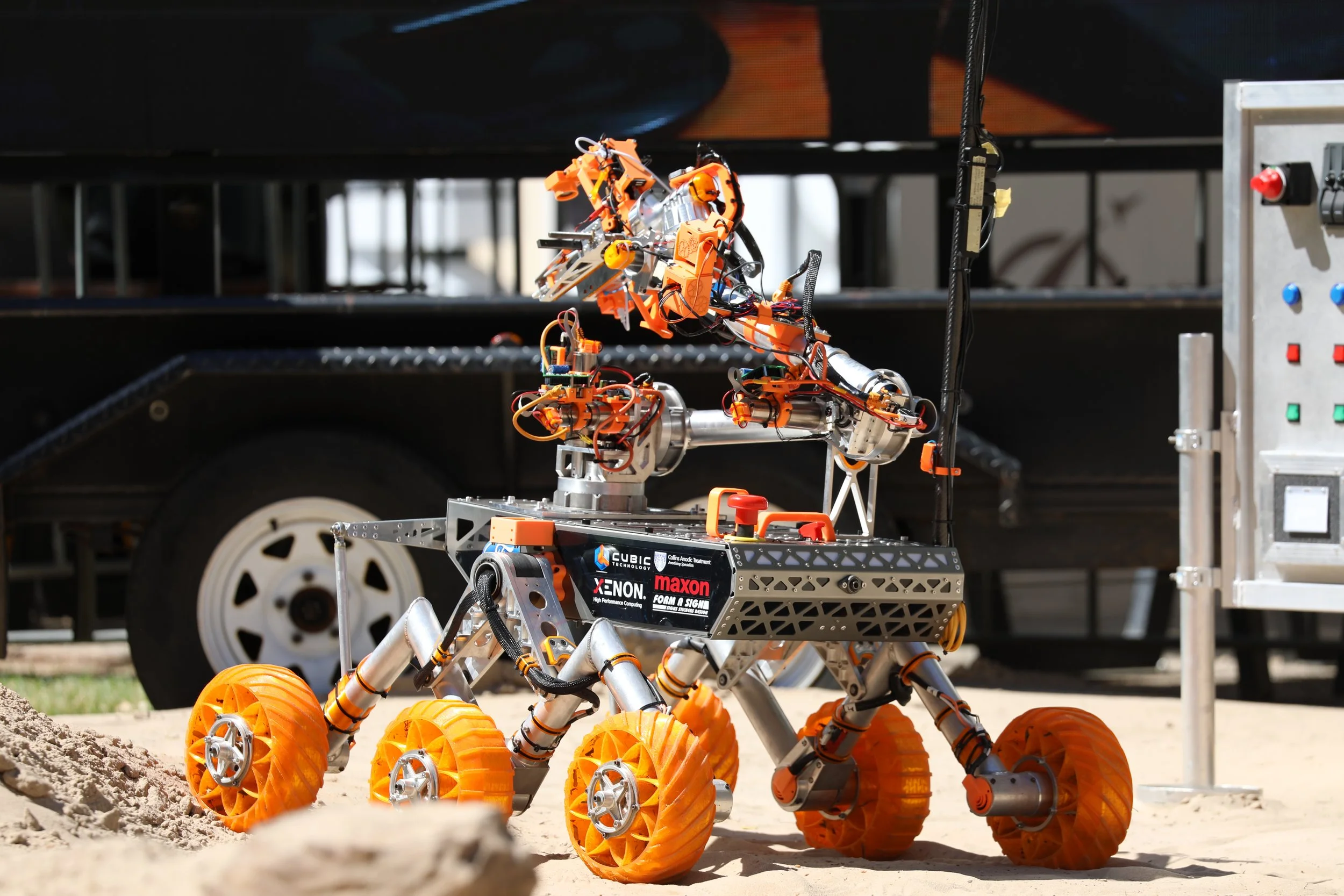
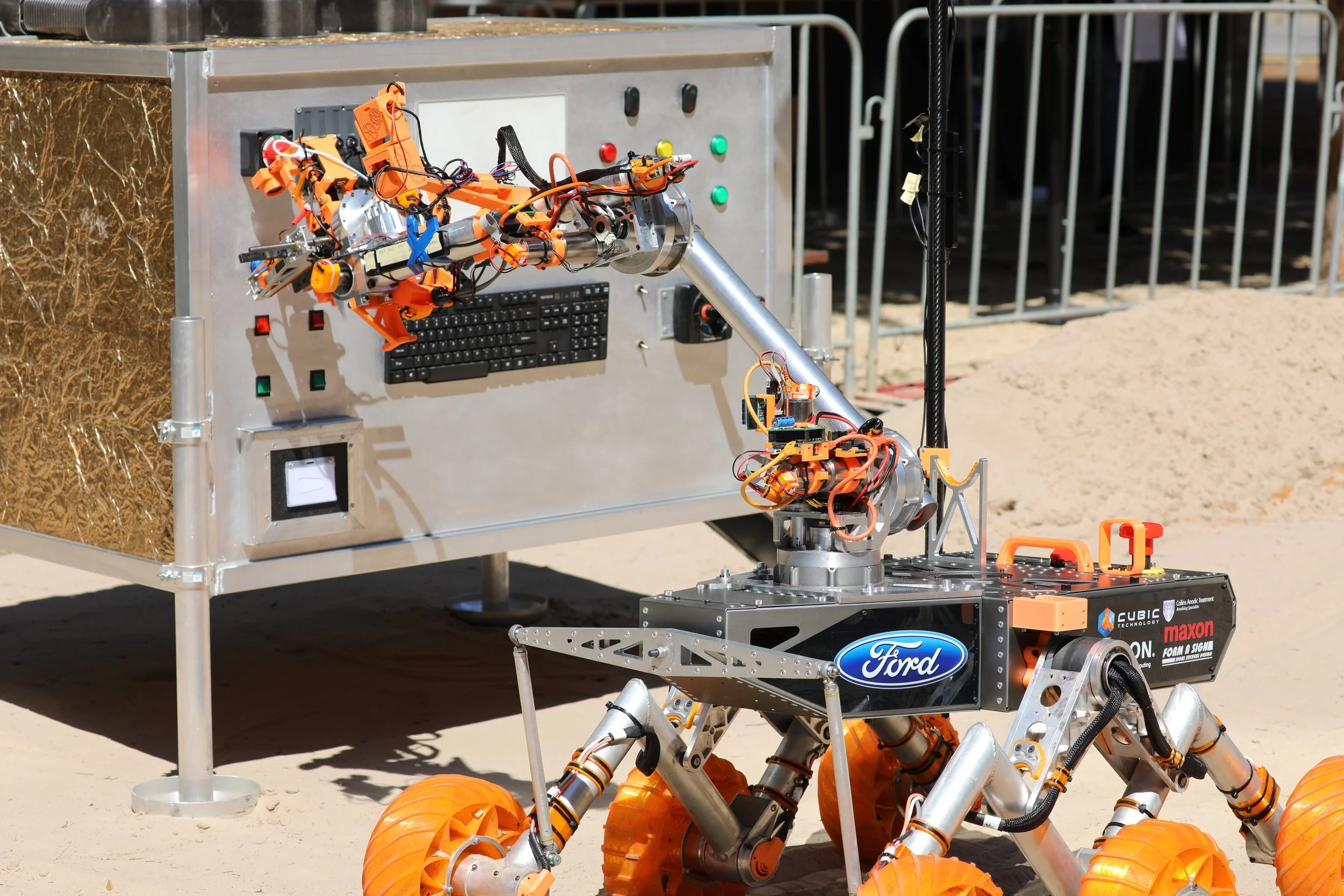
WARATAH
2023
Waratah is named after a native Australian flower. The name originates from the Eora Aboriginal word 'warada' meaning 'beautiful' or 'seen from afar'. The bold, bright and unseen pink hue of our rover this year is representative of our social campaign - the Pink Rover Campaign, which aims to start conversations about Women in STEM.This year, we overhauled our entire chassis design, implementing a rocker suspension with pivot steering, as well as brushless motors.
-
Weight: 25-70kg
Dimensions: 1.2m x 0.9m x 0.8m (excluding mast height)
Wheels: 3D printed polyurethane (TPU) with bike spoke internal geometry
Chassis Build: Laser cut aluminium frame with polycarbonate side panels
Suspension: Rocker suspension with pivot steering
Power: 2 x LiPO batteries (30V)
Motors and gearboxes: 4 air cooled brushless (BLDC) motors with a 36:1 reduction on drive and 70:1 reduction on pivots
Chassis and Arm Motor Controllers: Custom Brushless CAN-Bus Motor Drivers (BLCMDs)
Computing: Nvidia Jetson TX2, Arduino Nano, PIC Microcontroller
Communications: 5.8GHz (mounted to a 3m carbon fibre pole)
Control: Xbox 360 Controller and Thrustmaster Joysticks
Vision: 8 static microsoft LifeCam, 1 custom gimbal cameras
Sensors: DGPS, IMU, air pressure, temperature, humidity, UV-index, VOC
Life detection: Rapid enzyme and protein assays, UV-VIS spectrometer, RAMAN spectrometer and microscope
Resource collection: Water detection and extraction devices and deployable scooping instruments
Autonomous: Neural Network, sector search, GPS waypoint navigation







The Platypus chassis body has been re-designed to reduce core weight and accommodate larger arm and science payloads. The new body increases space for the electrical system, featuring new board-to-board connectors to allow modular expandability. At the core of the new electrical system is our custom made, compact Jetson TX2 carrier board.
PLATYPUS
2022
-
Weight: 30-70kg
Dimensions: 1.2m x 0.9m x 0.8m (excluding mast height)
Wheels: 3D printed polyurethane (TPU)
Chassis Build: Laser cut aluminium frame with polycarbonate side panels
Suspension: Novel design, custom passive parallel linkages, coined as “double bogie suspension”
Power: 2 x LiFePO batteries (28V)
Motors and Gearboxes: 6 air cooled DC motors (775 type) with a 2000:1 reduction on lower joints and 3000:1 reduction on the wrist
Chassis and Arm Motor Controllers: Custom CAN-Bus Motor Drivers (CMDs)
Computing: Nvidia Jetson TX2, Arduino Nano, PIC Microcontroller
Communications: 5.8GHz (mounted to a 3m carbon fibre pole)
Control: Xbox 360 Controller and Thrustmaster Joysticks
Vision: 6 static microsoft LifeCam, 2 custom gimbal cameras
Sensors: DGPS, IMU, air pressure, temperature, humidity, UV-index, VOC
Life detection: Rapid enzyme and protein assays, spectrometer and microscope
Resource collection: Water detection and extraction devices and deployable scooping instruments
Autonomous: Neural Network, sector search, GPS waypoint navigation



WOMBAT
2021
In the absence of the University Rover Challenge, our 2020/21 rover represented our first entry into the Australian Rover Challenge. This rover features a complete overhaul of the chassis, wheels and differential bar to improve the stability of the rover and increase the scope of our payloads. A new two-finger end effector is driven by cycloidal gearboxes (made in-house) and Maxon motors, while our science payload received its own extension of the chassis box and a deployable platform for the collection of multiple regolith samples.

-
Weight: 49.1 kg
Dimensions: 1.1m x 0.9m x 0.8m (excluding mast height)
Wheels: 3D printed polyurethane (TPU)
Chassis Build: Laser cut aluminium frame with polycarbonate side panels
Suspension: Novel design, custom passive parallel linkages, coined as "double bogie suspension"
Power: 2 x LiFePO batteries (24V)
Motors and gearboxes: 6 air cooled DC motors (775 type) with a 63:1 gearbox reduction
Chassis and Arm Motor Controllers: Custom CAN-Bus Motor Drivers (CMDs)
Computing: Nvidia Jetson TX2, Arduino Nano, PIC Microcontroller
Communications: 5.8 GHz (mounted to a 3m squid pole)
Control: Xbox 360 Controller and Thrustmaster Joysticks
Vision: 6 static cameras, 2 custom gimbal cameras
Sensors: GPS, IMU, air pressure, temperature, humidity, UV-index, VOC
Life detection: Rapid enzyme fluorescence and protein absorbance spectroscopic assays, spectrometer
Resource collection: H2O detection devices and deployable scooping instruments
Autonomous: Neural Network, sector search, GPS waypoint navigation



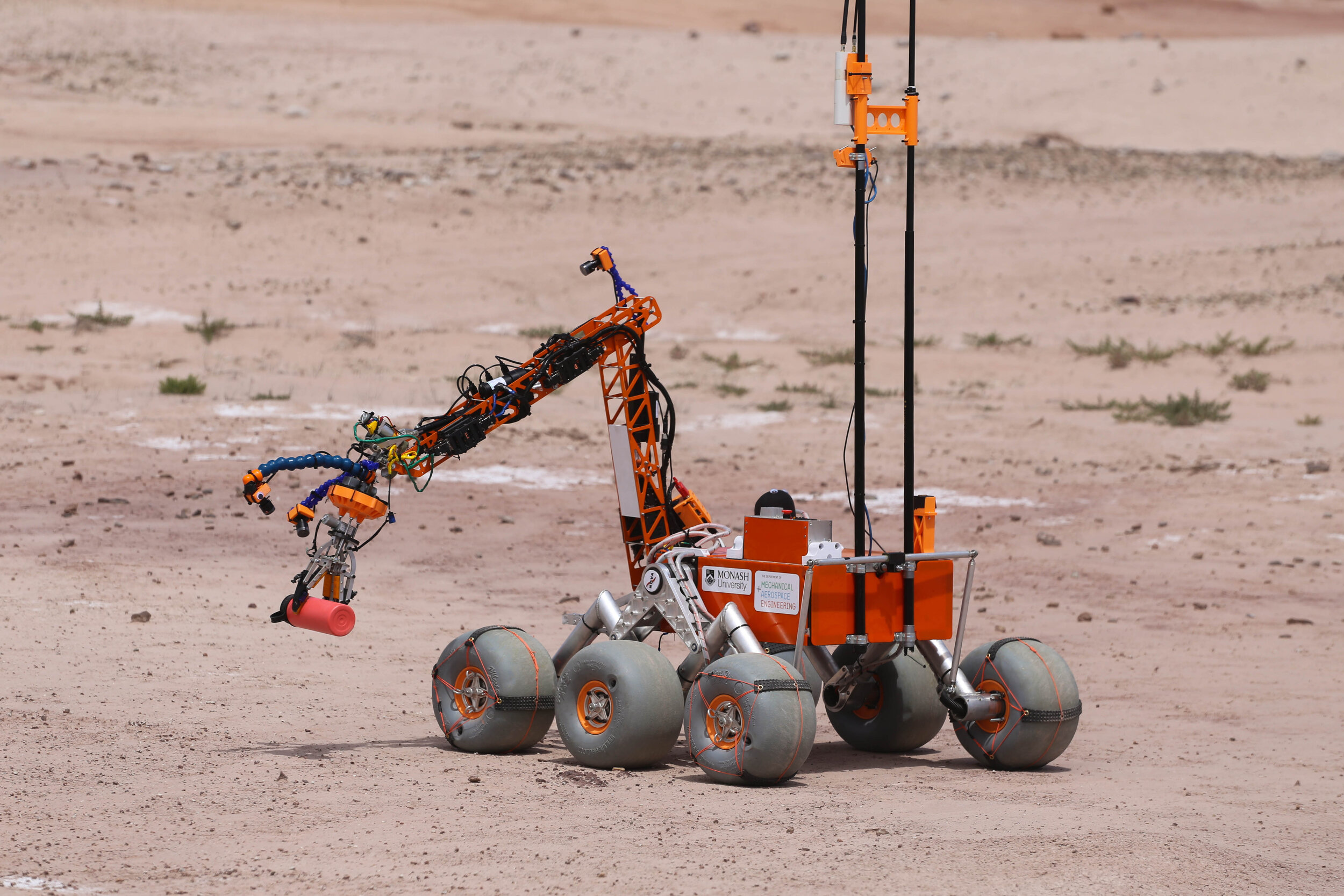
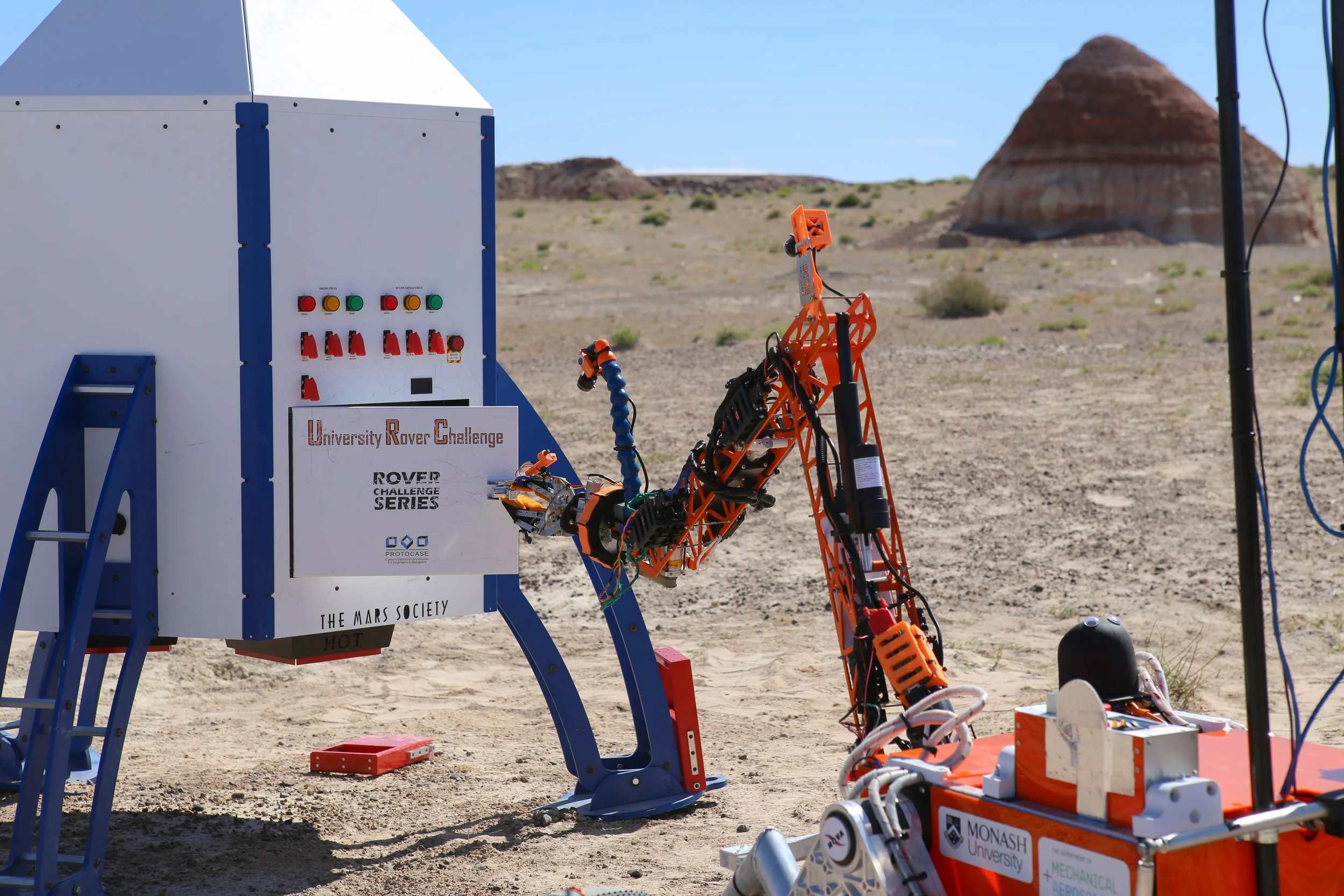
HUNTSMAN
2019
Our 2019 rover was shaped by lessons learnt in our first University Rover Challenge experience in 2018, featuring an overhaul to the chassis, robotic arm and communications subsystems. 2019 marked our first rover with a mountable in-situ rapid life detection payload.
-
Weight: 48.55kg
Dimensions: 1.12m x 1m x 3.3m
Wheels: Beach Tyres
Chassis Build: Aluminium and Acrylic
Suspension: Mechanical
Power: 4 x LiFePO batteries (24V)
Motors: 775 at a 64:1 gear ratio
Motor Controllers: Talon SRX
Arm Controllers: Hiwin Mikrosystems Linear Actuator (24V)
Computing: Nvidia Jetson TX2, Arduino UNO
Communications: 5.8 GHz and 900 MHz Radios (mounted to a 3m squid pole)
Control: Xbox 360 Controller and Thrustmaster Joysticks
Vision: 180 Degree Stereo Camera, 2 Gimbal Cameras, 3 Web Cameras
Sensors: GPS, IMU, air pressure, temperature, humidity, UV-index, VOC
Life detection: Rapid enzyme fluorescence and protein absorbance spectroscopic assays, spectrometer
Autonomous: Neural Network, sector search, GPS waypoint navigation


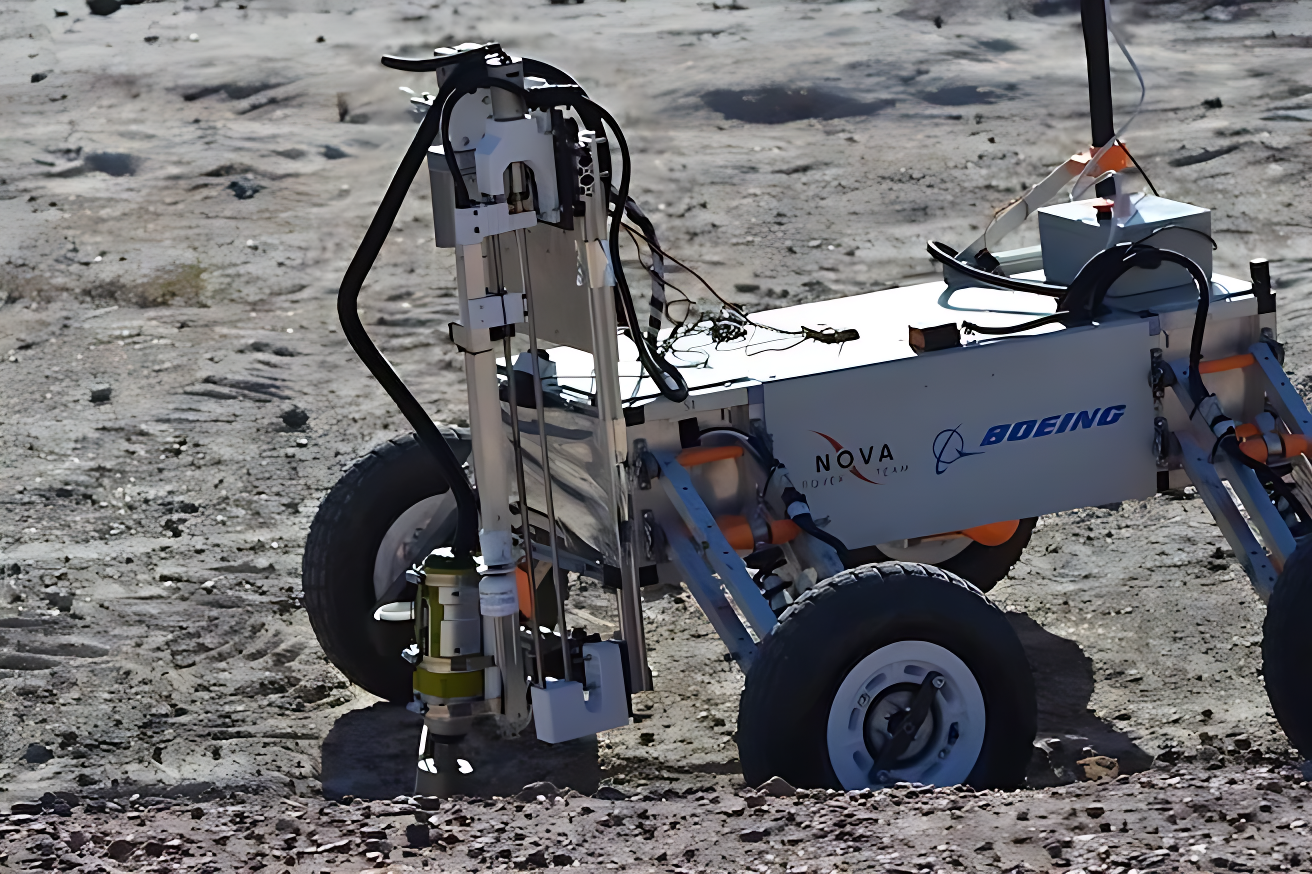
SANDSTORM
2018
Sandstorm was the first competition-ready rover created by Nova Rover.
-
Weight: 50.6kg
Dimensions: 1.1m x 0.93m x 1.3m
Wheels: Rubber tyres with 3D printed wheel housing
Chassis Build: Aluminium
Suspension: Double wishbone
Power: 4 x LiFePO batteries (24V)
Motors: Midwest Motion 346E 24V
Motor Controllers: Cytron MDD10A R2
Arm Controllers: Linear Actuators
Computing: Raspberry Pi 3
Communications: 5.8 GHz Radio (mounted to a 1 m carbon fibre pole)
Control: Xbox 360 Controller
Vision: Ricoh 360 Degree Stereo Camera, 2 Web Cameras
Sensors: GPS, IMU, air pressure, temperature, humidity, UV-index, VOC
Life detection: Bench top life detection using protein absorbance spectroscopy and DNA fluorescent microscope, in-situ collection and hermetic sealing of soil core
Autonomous: Colour detection, GPS waypoint navigation


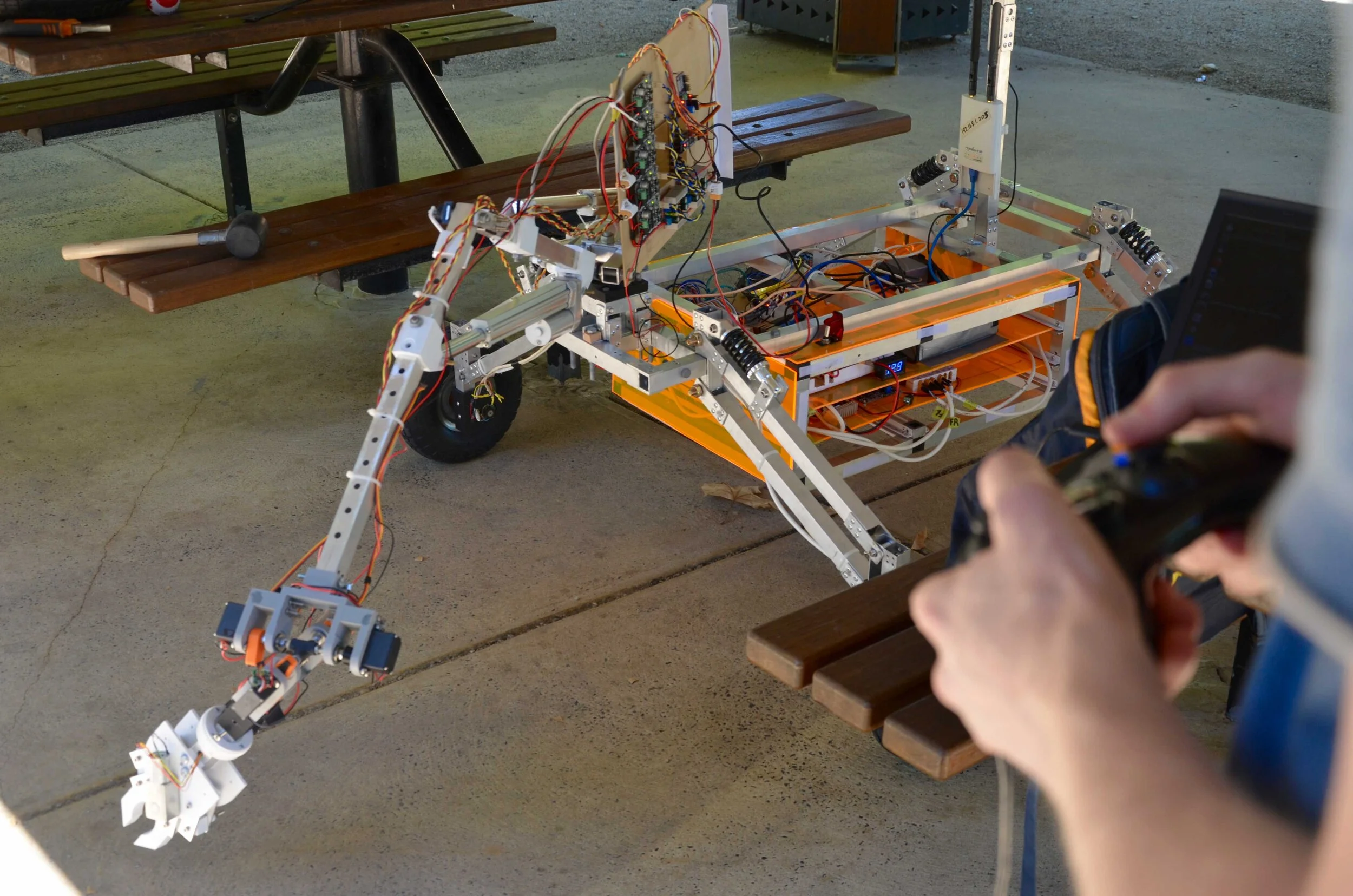
PROTOTYPE
2017
-
Weight: ~40kg
Dimensions: 1.05m x 1.2m x 1.3m
Wheels: Rubber tyres with 3D printed wheel housing
Chassis Build: Aluminium and Acrylic
Suspension: Modified double wishbone
Power: 4 x LiFePO batteries (12V)
Motors: Actobotics Brushed DC Motors (12V)
Motor Controllers: Cytron MD10C R3
Arm Controllers: Motion Dynamics Liner Actuators (12V)
Computing: Raspberry Pi 3
Communications: 5.8GHz Radio (mounted to a 1 m carbon fibre pole)
Control: Xbox 360 Controller
Vision: Ricoh 360 Degree Stereo Camera, 2 Web Cameras
Sensors: GPS, IMU
Life detection: None
Autonomous: LIDAR, Object Recognition
The prototype rover was the first rover produced by the team, making it a test bed for our preliminary designs and vessel to increase our technology readiness level.