Since 2020
The Australian Rover Challenge
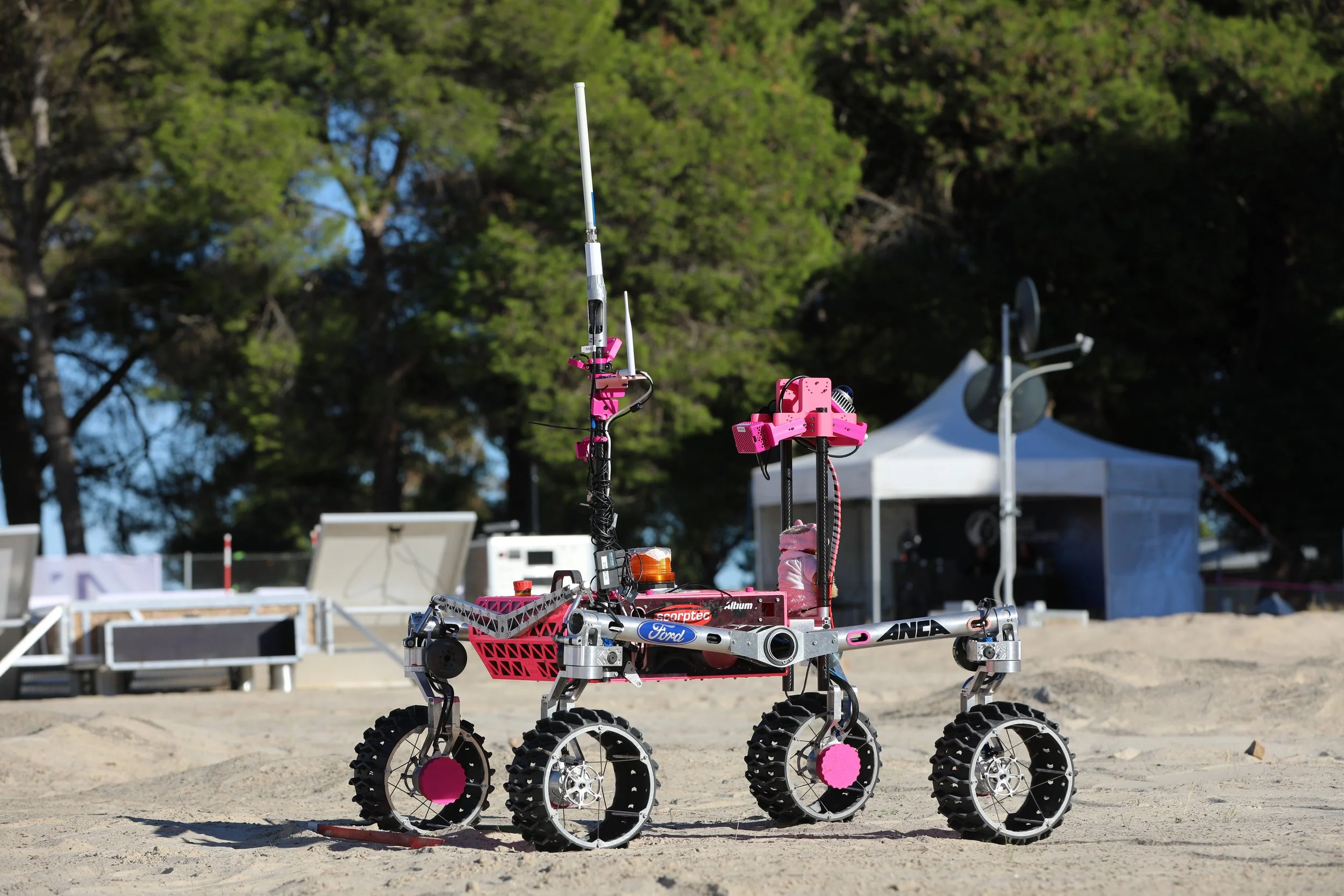
The Australian Rover Challenge (ARCh), hosted by the University of Adelaide, is a robotics competition that brings together student teams from around the world to take part in a full-scale simulated lunar mission.
Since its launch in 2020, the competition has grown into one of the leading platforms for student innovation in space robotics. Monash Nova Rover has proudly competed each year, achieving first place from 2021 to 2023, second place in 2024, and third place in 2025.


COMPETITION TASKS

-
![]()
Post-Landing Task
Rovers are required to execute a task list to work towards establishing an in-situ resource utilisation (ISRU) outpost, such as descending down egress ramp on the Lander, navigating the site, receiving instructions for carrying out maintenance and performing said jobs, and connect a propellant hose onto the Lander.
-
![]()
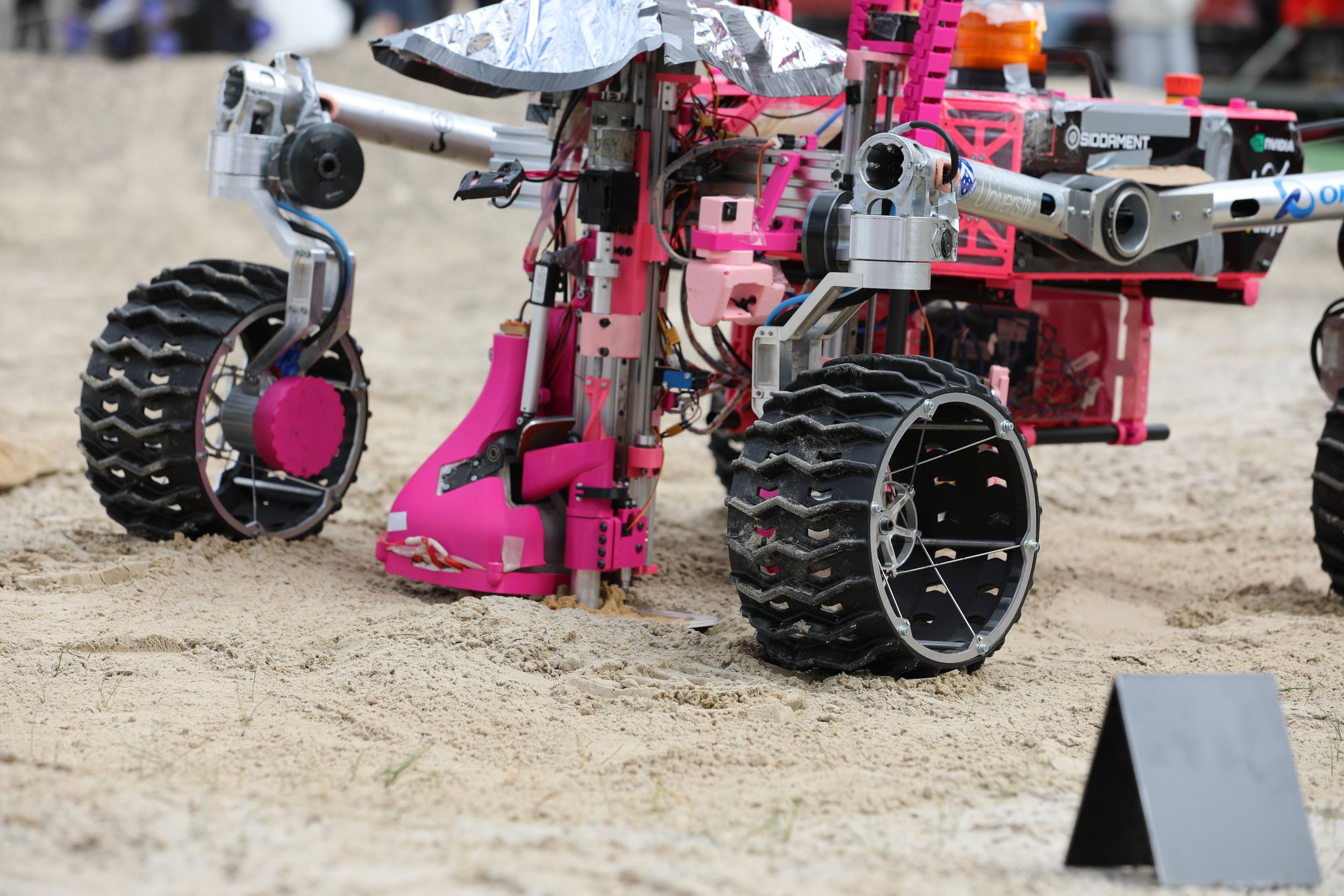
Lunar Resources Task
Rovers will conduct in-situ resource prospecting, excavation and processing at two distinct sample sites containing frozen volatiles and ilmenite-enriched regolith. Rovers will extract frozen water to recover liquid H₂O for supply storage, while also excavating and handling ilmenite-rich soil as potential future construction resources.
-
![]()
Lunar Excavation & Construction Task
Rovers will work on site preparation and foundation services to support future human landings. They must clear rocks, excavate and transport of regolith for berm construction, and assemble a team-defined surface feature using dust-mitigating pavers.
-
![]()
Mapping & Autonomous Task
Rovers need to explore a new area given a rudimentary map which will contain a series of landmarks that scientists are interested in imaging in more detail. The rover will need to navigate to these without human intervention. Then, either autonomously or under operator control, a larger-scale map of the arena will need to be constructed, and the locations of previously-unknown landmarks will need to be determined.